Как автомобили с автопилотом видят мир
Вот как автономные автомобили видят мир.

Как вы думаете, мы уже живем в будущем, которое описывали известные фантасты и которое мы не раз видели в фильмах в 20 веке? На самом деле и да, и нет, потому как часть предсказаний фантастов сбылась, а часть все еще находится в разряде фантастики. Что-то, конечно, сбылось, но немного не в том виде, в котором представлялось футурологам, фантастам и киносценаристам. Например, сегодня стремительно набирают популярность автономные, автопилотируемые, робомобильные, драйв-дроидные, автоматические и т. п. автомобили (названий автономных авто действительно очень много, правда, ни одно из названий еще не запатентовано). Уже сегодня автомобили с автопилотом не являются какой-то фантастикой.
Они реально существуют и даже серийно выпускаются. Правда, о полной автономии пока речь не идет. Поколение полностью автоматических автомобилей, которым не нужен водитель, только разрабатывается. Но уже совсем скоро и этот вид транспорта станет массовой реальностью. Естественно, в эпоху суперэлектронных технологий в автопромышленности с каждым днем все больше людей интересуют автономные автомобили.

Поэтому мы должны уже сегодня знать, как они работают и как могут управлять автомобилем без участия водителя. В том числе мы должны иметь представление, как новые автомобили с частичным автопилотом видят вокруг себя, что позволяет им управлять машиной без участия водителя. Также многих интересует вопрос, действительно ли автомобили с автопилотом могут быть лучше нас с вами – обычных водителей?
Вы задумывались о новомодных технологиях в автопромышленности? Вы понимаете, насколько сложным может быть автомобиль даже с полуавтопилотом, которым сегодня оснащается немало автомобилей? Знаете ли вы, что происходит, когда современный автомобиль берет на себя управление над самим собой? Дайте минутку, и я объясню.
Управлять движущимся объектом, значительно большим, чем вы, через сложную среду, полную других движущихся объектов, и контролировать скорость движения, включая полное прекращение движения при необходимости, регулировать направление движения и способ изменения скорости, а также контролировать направление движения в зависимости от условий окружающей среды (учитывать сцепление колес с дорогой, погоду и видимость на дороге) очень тяжело. Именно поэтому даже 10-15 лет назад автономные автомобили казались чем-то невероятным, не говоря уже о 20 веке, когда на экраны вышло множество фантастических фильмов, в которых мы не раз видели автомобили с автопилотом.
Но сегодня электронные технологии позволили автопроизводителям сделать сказку былью. Именно благодаря технологичному прорыву конструкторам и инженерам удалось научить автомобиль выполнять всю работу водителя, контролируя движение на дороге без участия владельца авто. Правда, в серийных автомобилях пока лишь устанавливаются первые поколения автономных систем, позволяющих взять на себя часть обязанностей водителя. Такие автономные технологии называют полуавтопилот.
На самом деле, если погружаться с головой в современные технологии автономных автомобилей, у вас голова пойдет кругом не только от сложности технологий, но и от невероятных инженерных решений, которые стали возможными благодаря электронному прогрессу во всем мире.
Но задумывались ли вы, могут ли современные электронные технологии быть лучше нас с вами? Могут ли автономные автомобили заменить обычных водителей? Тем более что, казалось бы, любой компьютер превосходит человека по скорости вычислений и, естественно, имеет шансы быть лучше его. Но не все так просто.

Ведь мы умеем водить машину не только из-за того, что наш мозг более развит. Дело в том, что наши тела предназначены, чтобы водить автомобиль. За миллионы лет эволюции, которая заключалась в борьбе людей против хищников, мы приобрели такие качества, которые позволили нам сесть за руль.
Так, благодаря эволюции мы получили бинокулярное зрение в прямом направлении, способность отслеживать движение объектов, пока мы сами находимся в движении (например, это было необходимо, чтобы кидать копья в бегущих мамонтов и бизонов), и способность предвидеть движение других движущихся объектов. То есть наш мозг научился прогнозировать движение других объектов.
Сами понимаете, если бы наш мозг не мог делать подобное, то об управлении автомобилем можно было бы забыть.
В итоге мы можем смотреть на пешехода на дороге на углу улицы и предсказывать его дальнейшие действия благодаря врожденному пониманию поведения человека. Также мы можем издалека определять, видит ли нас другой человек, используя эту информацию для того, чтобы решить для себя, как наилучшим образом подъехать к нему или в случае опасности предупредить другого человека, обозначив ваше присутствие если вас не заметили. То есть, сидя за рулем, мы заранее видим, заметил ли нас другой водитель или пешеход на дороге. Благодаря этому у нас есть время предупредить других участников дорожного движения об опасности.
В том числе мы с вами как водители становимся в буквальном смысле ясновидящими благодаря своему прежнему опыту. Именно поэтому чем больше имеет водитель опыта, тем он лучше и безопаснее управляет автомобилем. В том числе мы можем видеть на дороге то, чего нет в природе. Наш мозг умеет дорисовывать многие зрительные незаконченные образы.

Например, если мы движемся по дороге за рулем автомобиля и видим четко обозначенные разделительные линии дорожной разметки, но спустя какое-то время доезжаем до участка дороги, где эти линии неожиданно исчезают (стерлась со временем разметка, разметка еще не нанесена после укладки нового асфальта, забыли нарисовать разметку и т. п.), мы легко справимся с этой проблемой, так как наш мозг в этом случае знает примерно, где полосы должны находиться.
В итоге мы можем продолжать движение даже без разделительных полос, не боясь выскочить на встречку. И все это благодаря своему опыту (долгосрочному и кратковременному). В нашем примере работает кратковременный опыт. То есть мы продолжаем свой путь, несмотря на отсутствие разметки на дороге, благодаря последней увиденной разметке на дороге.
К сожалению, машины не обладают многими врожденными способностями, которые люди используют во время вождения. В итоге конструкторам и инженерам при создании автономных автомобилей, способных управлять собой, в значительной степени пришлось обучать их с нуля.
Правда, стоит отметить, что у машин есть некоторые довольно существенные преимущества по сравнению с человеком. Например, автомобили не способны чувствовать усталость, они не боятся скорости, а также могут непосредственно взаимодействовать с другими автомобилями, получая от них какие-то данные. Также автомобили могут более эффективно взаимодействовать со своей техникой и электроникой.

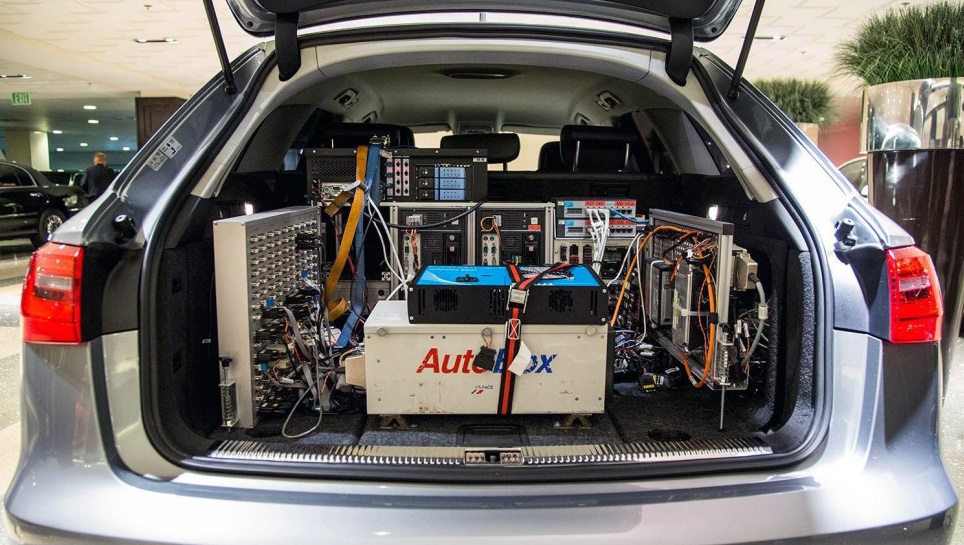
Большинство современных транспортных средств с автопилотом полагаются на один и тот же базовый набор технологий и общие принципы работы. Чтобы понять, как работают автономные машины, давайте рассмотрим базовый инструментарий, который позволяет дико продвинутому компьютеру вести себя так же, как ведет себя любой человек, управляющий автомобилем.
Оборудование на автономном транспортном средстве, которое может взять управление над автомобилем вместо человека, в первую очередь можно разделить на две категории: сенсорное оборудование и механические приводы.
Приводы просто передают решение управляющей системы на физическую часть автомобиля. Как правило, эти приводы плотно интегрированы с самим автомобилем.
Для поворота рулевой рейки используются специальные двигатели, которые могут вращать рулевое колесо без участия водителя. В том числе благодаря тому, что большинство современных автомобилей оснащаются системами, не требующими, скажем, физических кабелей или тросов, чтобы передавать действия водителя. Например, сегодня во всех новых автомобилях педаль газа не соединяется физическим тросиком с дроссельной заслонкой в топливной системе. Вместо этого, когда вы нажимаете педаль газа, дроссельная заслонка получает электронный сигнал с педали, который интерпретируется электроникой как увеличение оборотов двигателя. То есть в современных автомобилях педаль газа электронная.
Естественно, у инженеров не было проблем сделать педаль газа автономной при включенном автопилоте. Как вы уже поняли, все регулируется через компьютер автомобиля.
Намного труднее инженерам было научить автомобиль воспринимать и понимать постоянно меняющийся, постоянно движущийся мир вокруг себя. Вот здесь и пригодилось сенсорное оборудование.
Вот что это за оборудование:
Ультразвуковые датчики

Вы наверняка видели и знаете, как выглядят маленькие круглые "кнопки" на бамперах многих автомобилей. Знаете, что это такое? Естественно, многие автолюбители знают, что речь идет об ультразвуковых датчиках, которые чаще всего используются как датчики парковки (обычные парктроники, установленные в бамперах автомобиля). Парктроники хорошо справляются со своей задачей, предупреждая нас об опасности при парковке, сообщая нам, как близко автомобиль находится от препятствия. Как правило, ультразвуковые датчики работают на низких скоростях. Эти датчики определяют расстояния до других объектов с помощью посылаемого ультразвука, который, отражаясь от объектов, поступает обратно в датчики. Благодаря скорости прохождения сигнала туда и обратно и определяется расстояние до объектов.
На самом деле ультразвуковые датчики не используются массово в автономных автомобилях. Тем не менее во многих автономных транспортных средствах они помогают автомобилю понять окружающую среду. Именно поэтому я о них и решил упомянуть в этой статье.
Также не стоит забывать и о том, что сегодня во многих автомобилях установлены системы автоматической парковки, которые как раз и используют ультразвуковые парктроники, чтобы правильно парковать машину без участия водителя. В том числе в некоторых полуавтономных автомобилях ультразвуковые датчики помогают контролировать заданные маршруты следования.
Звук, который выдают парковочные датчики, представляет собой импульсы, которые мы не слышим. Эти импульсы могут быть между 40 кГц и 48 кГц (более новое поколение парктроников использует более высокий звук). Человеческий слух способен воспринимать звук максимум примерно на 20 кГц.
Собаки, кошки и летучие мыши, скорее всего, слышат звук, который исходит от парковочных ультразвуковых датчиков. И этот звук их сильно раздражает.
Видеокамеры
Видение – это, конечно, самое важное, что мы используем во время вождения. Поэтому большинство самодвижущихся машин оснащены системой, способной видеть окружающий мир с помощью видеокамер. Современные технологии, которые стали доступны в 21 веке, способны создавать очень маленькие высококачественные видеокамеры. Именно поэтому многие современные автомобили имеют современные камеры. Причем даже те, которые не оснащаются полуавтопилотом. Например, сегодня видеокамеры массово используются в автопромышленности в качестве камеры заднего вида, которая передает картинку заднего обзора на экран в салон машины, для того чтобы водитель мог видеть заднюю часть машины, когда паркует ее задним ходом. Это очень удобная система помощи водителю при парковке.
В автомобилях с системами автопилота камеры обычно устанавливаются над внутренним зеркалом заднего вида в верхнем центре лобового стекла. Эти камеры используются для системы контроля движения в полосе. Данные камеры передают по кадрам обзор дороги с полосами в компьютер, который, анализируя получаемые кадры, идентифицирует каждую линию дорожной разметки на шоссе. Так компьютер определяет, движется ли автомобиль внутри полос. Также эти камеры могут использоваться для систем аварийного торможения и идентификации дорожных знаков.

Кстати, все эти камеры в связке с компьютером можно назвать начальным этапом искусственного интеллекта, поскольку эта система на самом деле пытается извлечь из изображений, получаемых с видеокамер, какой-то смысл. То есть для компьютера это не просто набор видеокадров. Естественно, это, конечно, еще никакой не искусственный интеллект. Но тем не менее процесс обработки информации получаемых компьютером данных с камер нельзя уже назвать каким-то однобоким.
Разумеется, «Смысл» – это немного антропоморфизирующий термин: пока что человечество не создало реальный искусственный разум. На самом деле, если углубляться в технологию автономных автомобилей, то видеокадры, получаемые компьютером с камер, анализируются по специальному алгоритму, который содержит определенный набор критериев. Разумеется, система действует по этим критериям строго определенным образом. В случае же с искусственным разумом компьютер бы сам выстраивал и подстраивал различные критерии, строил бы свои собственные алгоритмы и проводил бы собственные вычисления.
Большинство автономных систем, устанавливаемых на автомобили с автопилотом, используют две видеокамеры. Это необходимо для того, чтобы получить бинокулярное зрение для реального восприятия глубины (такое же зрение и у нас).
Правда, камеры, которые устанавливаются под зеркало заднего вида на лобовом стекле, в отличие от камер в смартфонах и фотоаппаратах не так хороши. Большинство автомобильных камер имеют всего от 1 до 2 мегапикселей, что означает, что они видят мир с разрешением около 1600 x 1200 пикселей.
Неплохо. Но это гораздо меньше, чем человеческое зрение. Тем не менее этого достаточно, чтобы решить, что необходимо для управления автомобилем без участия водителя.
Но на самом деле для функционирования автопилота в машине не нужно качество картинки и насыщенных цветов. Кстати, именно по таким критериям мы обычно и делаем оценку камеры смартфонов и фотоаппаратов для использования в повседневной жизни. Для автономных автомобилей важно, чтобы компьютер получал изображение с камер как можно быстрее и за минимальное время обрабатывал полученные кадры.
И чем больше кадров в секунду будет передавать на обработку камера, тем быстрее компьютер может оценить получаемые картинки. Соответственно, от этого будет зависеть время реакции автомобиля в автономном режиме. Сами понимаете, что чем выше разрешение кадров, тем больше она занимает памяти и, соответственно, медленнее передается компьютеру, которому также для обработки видеокадров высокого разрешения необходимо время. Вот почему во всех автономных автомобилях устанавливаются камеры невысокого разрешения.
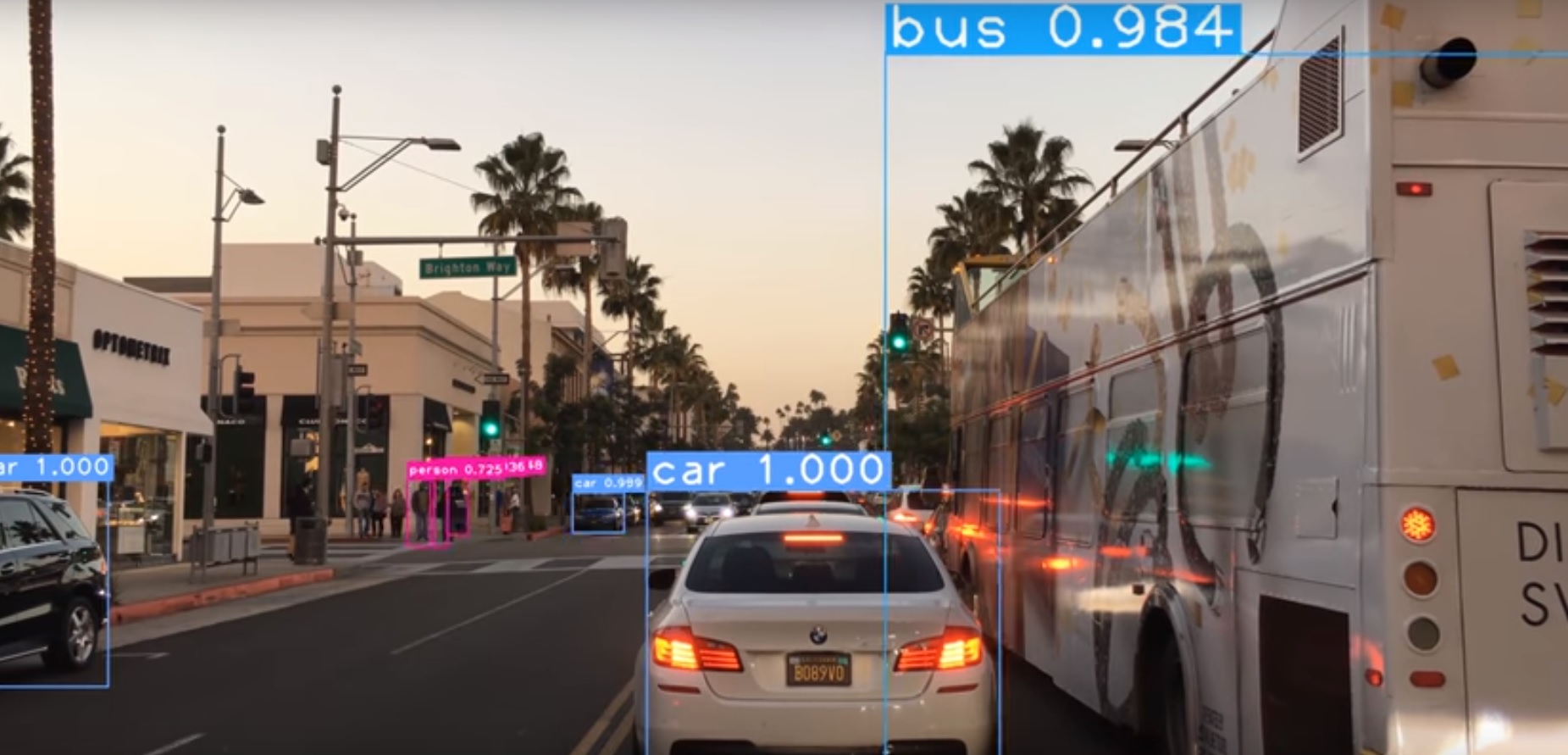
При обработке изображений с камеры система искусственного зрения автомобиля должна искать и идентифицировать ряд вещей:
- Дорожная разметка
- Границы дороги (встречка/обочина)
- Другие транспортные средства
- Велосипедисты, пешеходы, домашние животные, выброшенные матрасы, отлетающие колеса, доски на дороге и все остальное, что может оказаться на дороге и не является транспортным средством
- Уличные знаки, дорожные знаки, светофоры
- Сигнальные лампы другого автомобиля
Чтобы идентифицировать эти объекты и людей, система искусственного зрения с помощью камер должна определить, какие пиксели изображения являются фоном, а какие – реальными объектами на дороге, на которые стоит обратить внимание. Мы с вами обычно все это определяем инстинктивно. Но машина не понимает сути. Ведь компьютер получает цветную матрицу цветных пикселей размером 1600x1200. И для него, по идее, припаркованная машина рядом с рестораном на обочине ничем не отличается от неба или зданий, стоящих рядом с дорогой.
Чтобы заставить компьютер понять, что он видит через свои видеокамеры, необходимо использовать несколько разных методов. Объекты идентифицируются как отдельные от их окружения с помощью алгоритмов и процессов, таких как обнаружение границ всех объектов на картинке (на кадре), что представляет собой сложный и математически важный для компьютера метод взглянуть на заданное изображение и найти на нем границы между различными областями. Обычно это делается на основе различий в яркости изображений между различными областями пикселей.
Как вы можете себе представить, этот процесс является нетривиальным, поскольку любая данная сцена, просматриваемая через камеру, полна градиентов цвета, теней, ярких пятен, путаных границ и т. д. Это очень сложная математика, которая выглядит вот так...

... это именно то, на что способны компьютеры (вычислять математические формулы, уравнения и алгоритмы за считанные миллисекунды). Именно поэтому, как правило, этот процесс работает очень хорошо.
Далее, как только отдельные объекты отделены от их фона, они должны быть идентифицированы. Размеры и пропорция – главные факторы в идентификации транспортных средств. Ведь большинство автомобилей очень похожи и имеют большие размеры по сравнению с людьми, велосипедами, мотоциклами и т. п. Также все транспортные средства пропорциональны.
Вещи, которые воспринимаются автомобильным компьютером как крупные прямоугольники (размером 3,65 м х 1,52 м х 1,83), вероятно, являются автомобилями. Напротив, узкие объекты, которые имеют определенную форму, вероятно, являются велосипедами, мопедами или мотоциклами. Высокие продолговатые объекты, которые движутся, вероятно, являются людьми.
Вы не поверите, но математикам, компьютерщикам и инженерам довольно-таки быстро получилось научить компьютер идентифицировать автомобили, людей и велосипеды. Но тем не менее подобные автономные системы все равно еще весьма глупы по сравнению с людьми. Именно поэтому многие автомобильные компании создают различные имитации автомобилей, пешеходов и т. п., чтобы научить компьютер без ошибок распознавать все объекты на дороге. Например, компания Ниссан создала точные копии надувных автомобилей с целью обучить систему аварийного торможения распознавать объекты на дороге (в первую очередь людей и транспортные средства), чтобы вовремя остановить автономно автомобиль в случае опасности. Человеку, для того чтобы научиться управлять автомобилем и тормозить, подобных тренажеров не нужно:

Для обучения же автономной системы управления автомобилем подобные тренажеры – отличное решение. Например, чтобы научить автомобиль распознавать (идентифицировать) другие транспортные средства, необходимо провести большое машинное обучение, заложив в память компьютера тысячи примеров, предварительно классифицировав заранее подготовленные изображения.
Чтобы сделать эти изображения, и нужны различные макеты, имитирующие обычные автомобили. Тем не менее, несмотря на прогресс, любой компьютер сегодня все равно можно одурачить тысячами различных способов. Человека обмануть большинством способов не получится.
Например, трудно научить компьютер определять разницу между настоящим велосипедом и его изображением, нанесенным на заднюю часть автомобиля.
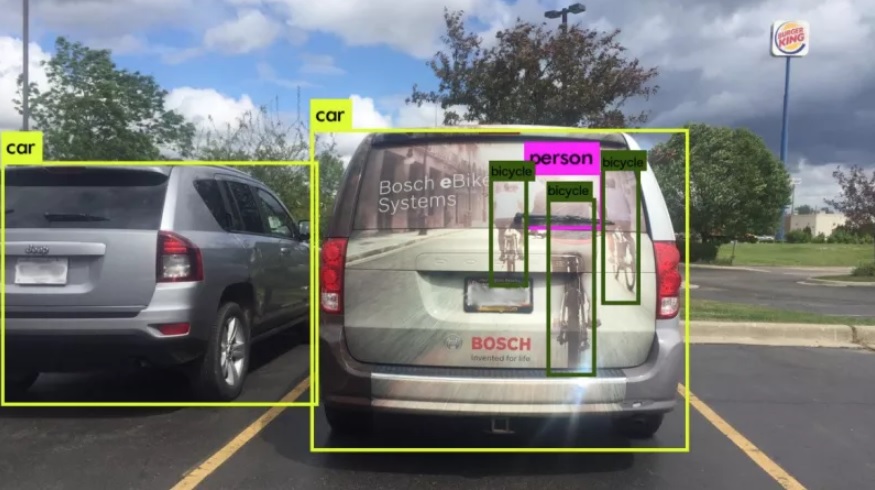
Это изображение выше из статьи на сайте MIT Technology Review. В этом материале освещается самая большая проблема в автономных автомобилях, оснащенных камерами, которые легко обмануть при идентификации объектов на изображениях. Это пример, когда нарисованный на автомобиле велосипед компьютер воспринимает как реальный, который движется по дороге. Таким образом, компьютер автомобиля может легко запутаться.
Для решения этой проблемы ученые, инженеры и компьютерщики решили не полагаться полностью на данные, получаемые с камер. В итоге было принято решение использовать видеокамеры как часть большого набора других датчиков, необходимых для безопасного движения автономных машин на дороге.
И это логично. Ведь чем больше будет различных вариантов восприятия мира, тем безопаснее будет автономный автомобиль. Сами понимаете, что в условиях ограниченной видимости (ночь, туман, дождь, снег) видеть, что происходит на дороге, с помощью камер недостаточно.
Вы ведь также плохо видите ночью. Вы же не раз замечали, что управлять автомобилем в ночное время, в дождь, в снег или туман намного сложнее. Так и компьютеру в автомобиле также тяжело видеть окружающий мир при ограниченной видимости с помощью камер. Именно поэтому на помощь камерам пришли другие системы, такие как радар или лидар.
Что касаемо количества видеокамер, необходимых автономному автомобилю, то достаточно всего пары стереофонических камер, обращенных вперед. Хотя наличие боковых и задних камер также желательно, чтобы помочь автомобилю видеть на 360°. Это идеально для автомобиля с автопилотом, но необязательно.
Радиолокационные датчики

Камеры дают хороший общий обзор окружающей среды вокруг автомобиля, но, чтобы превратить это видение в реальное трехмерное пространство, требуется сложное вычисление компьютера. На помощь приходит высшая математика. Чтобы помочь компьютеру определить, насколько далеко автомобиль находится от других автомобилей и объектов вокруг себя, используются радарные датчики.
Радарные системы уже сегодня довольно распространены в автомобилях. Удивлены? Да-да, во многих современных автомобилях стоят радиолокационные датчики (по-простому – радары). Например, с их помощью в новых автомобилях работает адаптивный (динамический) круиз-контроль.
Адаптивный круиз – это полуавтономная система, которая позволяет автомобилю ездить с заданной скоростью (как при обычном круиз-контроле, когда скорость машины автоматически поддерживает электроника), а также автоматически поддерживать дистанцию до других автомобилей без участия водителя. То есть при необходимости увеличить дистанцию ваш автомобиль автоматически снижает скорость, активируя тормозную систему.
Чтобы эта система исправно работала, автомобили комплектуются радиолокаторами, которые определяют расстояние от вашего автомобиля до автомобиля, идущего впереди вас. В итоге для контроля дистанции электроника автомобиля без участия водителя контролирует педаль газа и педаль тормоза.

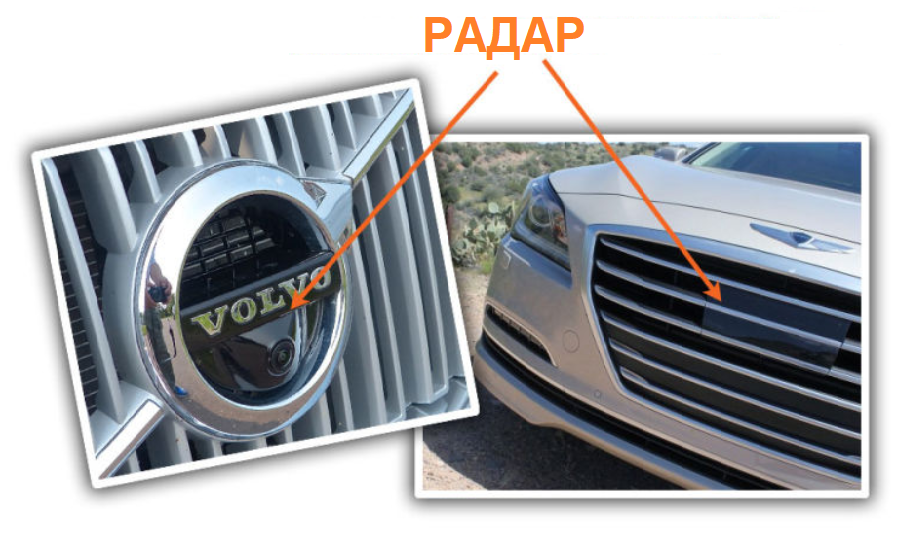
Обычно чтобы определить, есть ли у автомобиля радиолокационный излучатель/приемник, вам нужно внимательно посмотреть на переднюю часть машины. Если вы видите странную блестящую плоскую панель, маскирующуюся под часть решетки радиатора или если передняя эмблема-логотип «напечатана» на сплошной блестящей черной панели, то, скорее всего, перед вами автомобиль, на котором установлен радиолокационный приемопередатчик.
Стоит отметить, что радиолокационные данные, поступаемые с радарных датчиков, не пытаются дать компьютеру полный обзор для искусственного зрения. Эти датчики идут в дополнение к камерам. Благодаря радарам информация, поступаемая из внешнего мира, более надежна. Благодаря радиолокационным данным информация о расстоянии, поступаемая в компьютер, более точна. Особенно когда автомобиль движется в темноте и в других неблагоприятных условиях, которые могут запутать систему на базе видеокамер.
Лидар
В некотором смысле лидар является одним из самых противоречивых сенсорных систем, используемых на автомобилях с автопилотом. Причем не из-за их принципа работы. Дело в том, что система на основе лидара не используется компанией Tesla. А мы знаем, что компания Tesla умеет привлекать к себе внимание не хуже, чем это делает, например, компания Apple. И поскольку компания Tesla решила не использовать лидар на своих автомобилях, то с учетом ее популярности по всему миру многие люди узнали, что американская автомобильная марка по каким-то причинам решила не использовать современные технологии на основе лидара.

А раз так, многие полагают, что лидару не место в автопромышленности. К сожалению, многие автолюбители реально думают, что раз Tesla не использует какую-то технологию, то, значит, это самое правильное решение. Но это, конечно, не так. Это все равно что на примере смартфонов Apple считать, что карта памяти современным телефонам не нужна. Согласитесь, это бред.
Немного странно, что компания Tesla избегает лидара, потому что лидар – невероятно мощный инструмент, помогающий движущейся машине ощущать окружающий мир.
Лидар определяет направление и дальность света. То есть, по сути, лидар – это своеобразный радиолокатор на основе света.
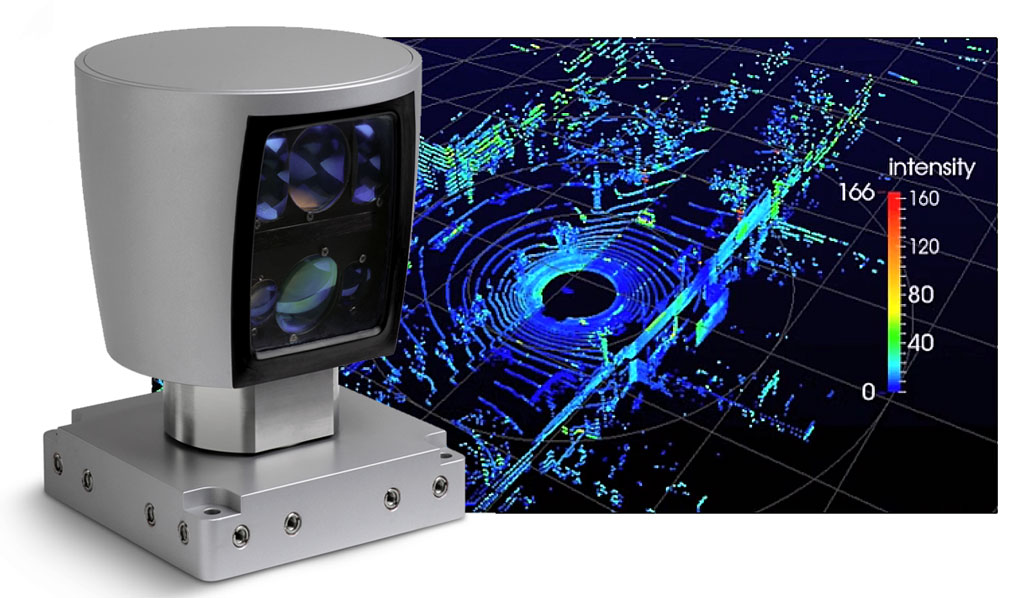
Лидар использует низкоинтенсивные, невредные и невидимые (для наших глаз) лазерные лучи, которые направляются к мишени (в нашем случае, например, это впередиидущий автомобиль). В большинстве автономных машин используется лидар, который излучает лазерные лучи вокруг автомобиля на полные 360°. Отраженные от объектов импульсы приходят обратно к автомобилю, направляющему лазерные лучи. Далее компьютер измеряет время возврата импульсов и длину волны для вычисления расстояния от отправителя до объекта.
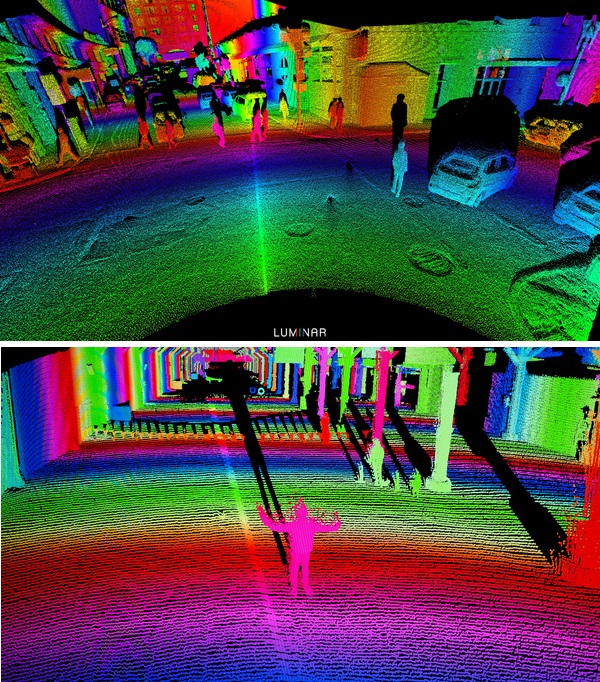
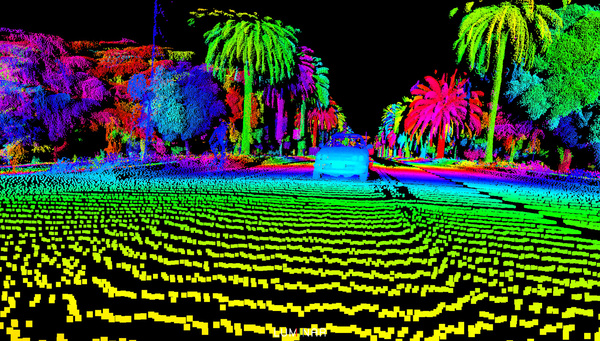
На практике лидар может производить очень подробные визуализации с высоким разрешением окружающей среды вокруг автомобиля, оснащенного автопилотом. Как компьютер видит мир с помощью лидара, вы можете посмотреть выше на фотографиях.

Впечатляюще, правда? Лидар часто дает очень подробную картинку окружающего мира, которая позволяет рассмотреть даже различные текстуры поверхности и довольно мелкие детали проезжающих автомобилей. Лидар способен видеть даже такие вещи, как выбоины (ямы) и крышки люков на дороге.
Лидары также являются наиболее вероятными приборами, которыми будут в будущем оснащаться все автомобили с автономными системами. Правда, для этого придется изменить конструкцию и дизайн будущих транспортных средств. То есть лидары могут стать главными виновниками изменения внешности всех автомобилей. Все дело в том, что для нормального функционирования лидара нужна высокая точка обзора, чтобы беспрепятственно сканировать окружающее пространство вокруг автомобиля на 360°.
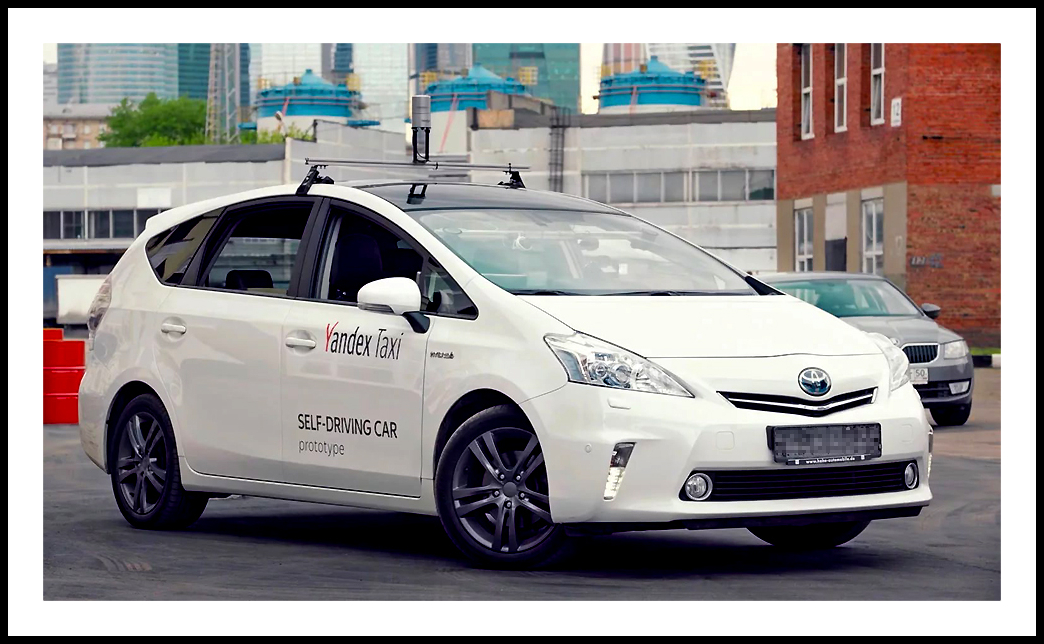
Вот почему лидары в настоящий момент рассматриваются как купольные объекты, устанавливаемые на крыши автомобилей с автопилотом. Вы наверняка не раз видели в Сети испытательные автономные машины Яндекс, Гугл и Ауди, которые на крыше имеют странную конструкцию. Это и есть лидар, помогающий компьютеру видеть мир во всех деталях на 360°.

Нет, конечно, они не 100% панацея для искусственного зрения. Именно поэтому автономные автомобили помимо лидара имеют и традиционные датчики для полноценной оценки окружающего пространства (камеры, радары, ультразвуковые датчики).
Но благодаря лидару разработчики уменьшили количество ошибок в плохие погодные условия и в темное время суток. То есть благодаря лидару автономные автомобили не имеют проблем при передвижении без участия водителя ночью, в туман, в снег, в дождь и т. д.
Фактически лидар может обнаружить в темноте чернокожего мотоциклиста.
Еще одно большое преимущество лидара в том, что он сразу передает компьютеру 3D-картинку в отличие от стереокамер, которые даже с бинокулярным зрением передают фотокадры, состоящие из плоского массива пикселей, требующих расшифровки, по специальному сложному математическому алгоритму для перевода в трехмерную пространственную карту. Сами понимаете, что для обработки массива двухмерных пикселей требуется время любому компьютеру.
Информация, обнаруженная лидаром, уже, по сути, является трехмерными данными. Это означает, что для лидарного изображения окружающего пространства вокруг автомобиля требуется меньше времени на компьютерную обработку по сравнению с картинкой, получаемой с видеокамер.
Естественно, благодаря ускоренному времени обработки информации сокращается время отклика автономных автомобилей на события, происходящие в окружающем пространстве.
Несмотря на невероятный прорыв инноваций и изобретение лидара, это устройство является еще относительно новой технологией. А мы знаем, что новые технологии всегда очень дороги. Недешевы и лидарные системы, которые пока из-за своей цены не могут массово применяться в мировой автопромышленности, где основные компоненты автомобилей достаточно дешевы. Поэтому в настоящий момент лидарные системы все еще находятся в стадии разработки с целью удешевления технологий в будущем.
GPS / ГЛОНАСС

В настоящее время это довольно знакомая технология для большинства из нас. Благодаря этой технологией мы все реже теряемся в незнакомой местности по сравнению с прошлыми десятилетиями, в которых водители часто терялись на незнакомой дороге и подолгу затем изучали бумажные карты, чтобы выехать на нужный маршрут.
Но благодаря тому, что спутниковая навигация стала доступна всему миру, мы теперь не боимся без бумажной карты отправляться в незнакомую местность.
Глобальная система позиционирования (GPS), или Глобальная навигационная спутниковая система (ГЛОНАСС), основана на спутниках, вращающихся вокруг Земли, чтобы точно знать, где мы находимся. Все автономные автомобили в будущем будут использовать эти системы не только для навигации, но и просто для управления автомобилем без участия водителя, поскольку система GPS/ГЛОНАСС в связке с навигационными картами в машине знает траекторию всех дорог на Земле. Благодаря спутникам электроника автомобиля заранее знает траекторию автодороги, что позволяет загодя снижать скорость автомобиля. То есть, по сути, благодаря спутниковой навигации автономные автомобили могут прогнозировать будущие дорожные условия.
Например, GPS/ГЛОНАСС позволяет автономным автомобилям планировать, как двигаться впереди, когда быть готовым замедлиться для поворота, перестроения, а также когда можно ускориться, допустим, чтобы перепрыгнуть разводной мост в Питере.
На самом деле автономный автомобиль с помощью спутниковой навигации знает, где находятся разводные мосты, и, скорее всего, выберет автоматически тот путь, где мосты не разведены.

Стандартная GPS/ГЛОНАСС-система точна в пределах от одного до трех метров. Если бы вы, будучи водителем, управляли автомобилем с погрешностью от одного до трех метров, то, скорее всего, вас быстро бы лишили водительского удостоверения. Ведь в пределы даже одного метра может много что попасть, например, люди, собаки, велосипеды и так далее. Так что этой погрешности недостаточно, чтобы точно передвигать автомобиль в автономном режиме совершенно безопасно с помощью спутниковой навигации.
Чтобы компенсировать относительно грубое разрешение спутниковых систем GPS/ГЛОНАСС (имеется в виду, что местоположение автомобиля с помощью спутниковой навигации определяется на всей Земле с погрешностью от 1 до 3 метров, что недостаточно для безопасной езды в автономном режиме), инженеры и проектировщики автономных машин придумали то, что называется локализацией.
На самом деле существует несколько способов выполнить локализацию, но большинство методов основаны на других сенсорных системах автомобиля с целью определения его местоположения в пределах десяти сантиметров или около того. То есть в дополнение к спутниковой системе навигации автономные автомобили для определения своего местоположения на дороге используют весь арсенал различных датчиков, что значительно сокращает погрешность в определении координаты на местности.
Во многом точно определить местоположение автомобиля на карте помогает все тот же дорогой лидар.
В некоторых автомобилях используется технология, которая называется фильтрами частиц, – ими компьютер засеивает виртуальную карту местности. Эти частицы представляют собой точки возможного нахождения транспортного средства на карте. Когда транспортное средство движется, датчики дают данные о скорости и об угле движения автомобиля. Соответствующее облако виртуальных точек на карте движется вместе с автомобилем. Причем местоположение виртуальных пикселей сравнивается с известными системе ориентирами на карте, которые измеряются через лидарные системы автомобиля.
GPS/ГЛОНАСС является технологией, которую автономные транспортные средства будут использовать, чтобы сообщать о своем местоположении в любые организации и государственные структуры: правоохранительные органы, страховые компании, автопроизводителю, который построил автомобиль с автопилотом, компании, разрабатывающей программное обеспечение для автономного вождения. Также информация о местоположении автономных автомобилей может в будущем передаваться в любое количество различных организаций. В том числе и потенциальным рекламодателям и маркетинговым компаниям, которые могут транслировать на экран автономных машин при движении в определенной местности какую-то местную рекламу.
Так что поездка на автономном автомобиле, скорее всего, в будущем не будет частной и анонимной, как это происходит сейчас, когда вы движетесь в своем личном автомобиле и о вашей поездке, естественно, никто не знает.
В будущем вы должны будете быть готовы к тому, что о вашей поездке в автономном авто могут знать многие организации.
Коммуникация и объединение всех систем
Все ныне существующие различные формы восприятия мира объединяются, чтобы создать общую технологию для составления качественного образа окружающей реальности для автомобиля. И это неизбежно в автомобильной промышленности, которая реально движется к тому, что в скором времени в мире начнут массово использоваться полностью автономные автомобили. Дело в том, что по отдельности каждая сенсорная система в автономном автомобиле имеет довольно значительные недостатки и ограничения, которые реально могут вызвать проблемы на практике.
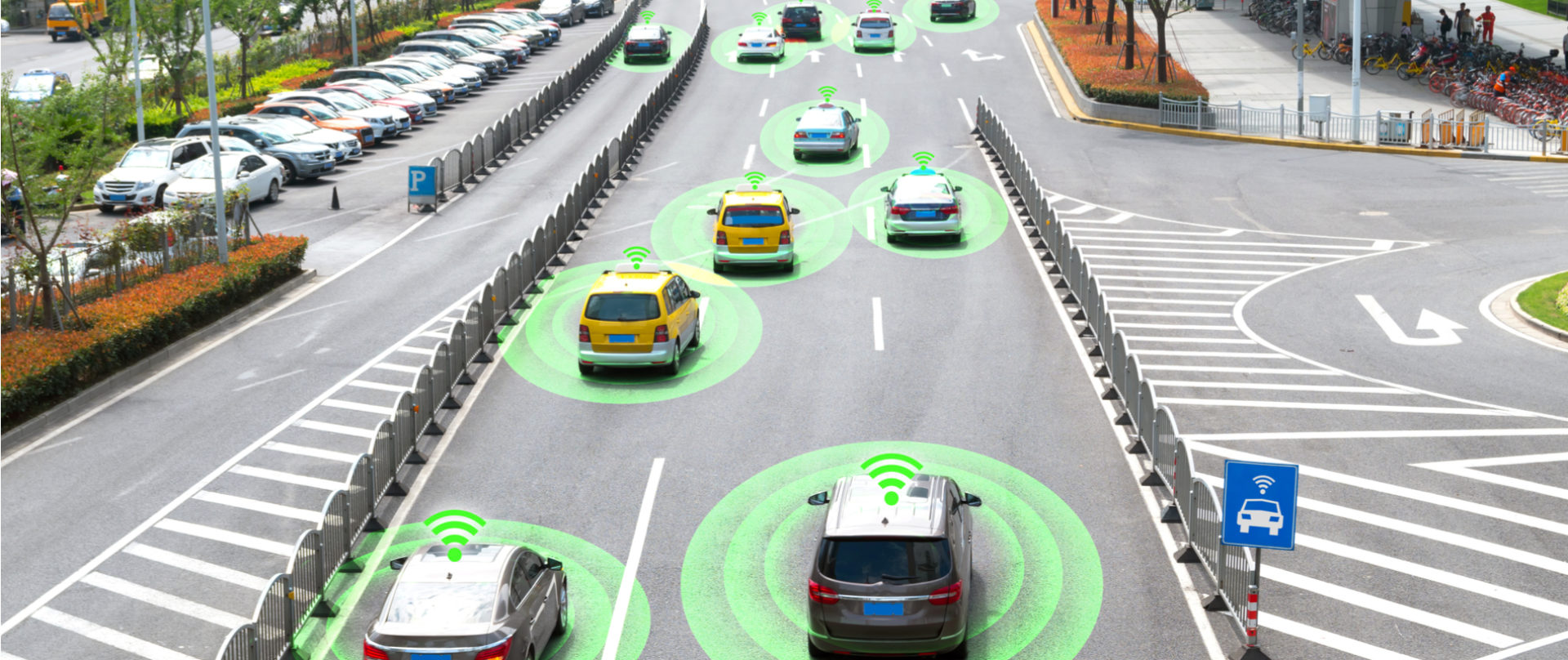
Чтобы объединить все системы, была разработана технология, позволяющая установить связь между автомобилями на дороге, а также подключить все машины к единой цепи централизованных серверов. Эта технология получила название "V2V".
Основана она на радиосвязи в диапазоне 5,9 ГГц (в США и в Европе). В Японии эта система работает на частоте 5,770 -5,850 ГГц и 715-725 МГц.
Идея заключается в том, что транспортные средства при приближении друг к другу должны делиться некоторой важной информацией о том, что они делают: скорость, место назначения, прогнозируемый путь, любой информацией о дорогах или проблемах безопасности и т. д.
Это позволит автомобилям на дороге работать как единое целое. Например, эта система позволит значительно улучшить дорожный трафик и безопасность на дороге.

Кроме того, подключив автомобили к единой информационной базе данных, можно передавать на компьютеры всех транспортных средств информацию, связанную с инфраструктурой местности, а также информировать автомобилистов о состоянии загрузки дороги, работе светофоров, плотности дорожного трафика, перекрытии движения, авариях и т. д.
В действительности чем больше информации, доступной для автомобилей на дороге, тем лучше будет их коммуникация. Особенно это касается автомобилей с автопилотом. Ведь благодаря такой единой коммуникации автономные транспортные средства смогут действовать как самомодифицирующаяся система для поддержания оптимального потока машин на определенной дороге, что частично позволит устранить проблемы с образованием заторов на дороге, которые очень сильно раздражают нас сегодня.
В настоящий момент многие автомобильные компании в рамках единой программы разрабатывают подобную глобальную систему, что позволит в будущем установить единый глобальный стандарт для передачи информации между автомобилями.
Также вполне возможно, что эта система будет использована и на обычных автомобилях без систем полного автопилотирования. В том числе не исключено, что такой системой в будущем можно будет оснастить любой старый автомобиль, установив специальное оборудование, понимающее протокол передачи данных между автомобилями. Причем подобной системой могут быть оснащены даже старые примитивные автомобили, которые будут передавать информацию о скорости, положении дроссельной заслонки, угле поворота и местоположении по данным спутников. Это даст возможность автономным автомобилям подготовиться со встречей старой "Волги" или "Копейки" на дороге. ))
Сверхъестественные технологии – уже скоро
Нет, обычно такое вы увидите только в научной фантастике, где писатели любят пофантазировать об искусственном разуме компьютеров будущего.
Тем не менее автомобили будущего с автономными компьютерными сложными системами все-таки будут иметь частичку своеобразного самосознания. И это уже удивительно и даже сверхъестественно. Посмотрите, как сегодня развиваются в Сети нейронные компьютерные сети, которые умеют без нашего с вами участия распознавать по изображениям объекты, начиная от мостов, домов и заканчивая насекомыми. Это первый шаг к созданию реального искусственного разума, которого так боялись фантасты и сценаристы фантастических кинолент.

Автономные автомобили движутся, по сути, так же, как и мы: они «оглядываются» по сторонам, насколько это возможно, следуют в правильном направлении и избегают других автомобилях, для того чтобы не столкнуться ни с кем и ни с чем.
Но чтобы автономные автомобили реально смогли двигаться без участия водителя, им в любом случае необходим искусственный разум, который будет осознавать свои действия. Иначе автономным автомобилям делать на дороге нечего. Ведь только мы с вами понимаем, что делаем за рулем, и, соответственно, несем ответственность за свои действия в автомобиле.
Тем более что пока мы с вами все равно лучше любых автономных автомобильных систем. Дело в том, что наша человеческая способность, реагировать за считанные миллисекунды на различные ситуации на дороге при движении на большой скорости, останавливать автомобиль в нужном месте, а также соблюдать дистанцию в любых дорожных условиях просто удивительна. Мы умеем чувствовать автомобиль так, как никто другой на планете.

Мы делаем это пока лучше компьютера. И это не может не впечатлять. Наши умения – это продукт миллионов лет эволюции на Земле. И вряд ли в ближайшие годы компьютерные системы смогут сделать автономные автомобили лучше нас. Неудивительно, почему самым умным инженерам, конструкторам и компьютерщикам до сих пор не удалось сделать автономные автомобили лучше человека. Именно поэтому мы сегодня и не пользуемся массово автономными автомобилями. Ведь иначе они уже давно бы пришли на мировой авторынок.
Так что мы уже преодолели довольно-таки долгий путь своего развития и продвинулись далеко в области высоких технологий. Но, как нам кажется, нам предстоит еще долгий путь, прежде чем нас с вами заменят полностью автономные автомобили.